红外(IR)NEC协议驱动软件设计 |
您所在的位置:网站首页 › 红外 软件 › 红外(IR)NEC协议驱动软件设计 |
红外(IR)NEC协议驱动软件设计
|
1、红外遥控原理
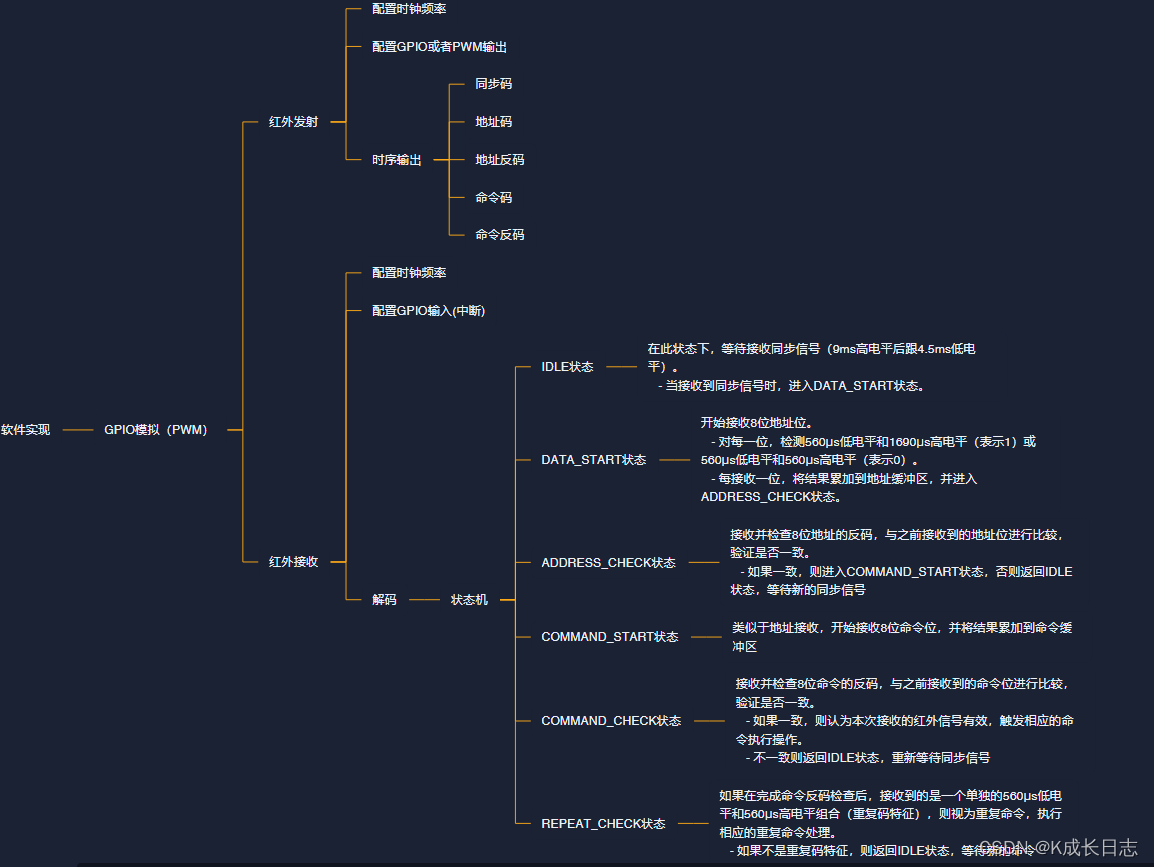
红外遥控原理是一种利用红外线(波长约为940纳米左右的不可见光)进行无线通信的技术,广泛应用于家用电器、多媒体设备及其他各类电子产品的遥控控制。其基本原理可以概括为以下几个步骤: 1. 信号编码: •遥控器内部含有一个微型处理器,将用户的按键行为编码为特定的二进制数据序列。根据不同的红外遥控协议(如NEC、RC5、Sony SIRC等),数据会被转换为脉宽调制(PWM)信号,通过高低电平的持续时间(占空比)来表示二进制的0和1。 2. 红外发射: •编码后的数据通过红外发射管(IR LED)发送出去。发射管在接收到脉冲信号后,会产生一定频率(通常为38kHz左右)的红外光脉冲信号。脉冲的高电平对应红外LED的开启,低电平对应关闭。 3. 接收与解码: •红外接收器(如一体化的红外接收头)检测到这些红外光脉冲信号,并将其转换为电信号。 •接收器内部包含一个光电二极管,用于感应红外光强度的变化,然后经过一系列信号放大、滤波、整形等处理,还原出原始的脉冲信号。 •微控制器对接收到的脉冲信号进行解码,识别出其中的地址码、命令码及其校验码,从而执行相应的动作。 4. 协议解析与执行: •解码后的数据按照红外遥控协议的约定进行解析,确定是哪个设备的哪个命令。 •控制设备(如电视、空调等)根据接收到的指令执行相应的操作。 总的来说,红外遥控系统实现了通过无线方式将用户指令传输给被控设备,并确保指令的正确执行。其优势在于成本较低、技术成熟且应用广泛,但也存在一定的局限性,如传输距离较短、易受角度和遮挡物影响等。 2、NEC协议关于NEC协议的介绍:NEC协议 3、软件方案结合红外遥控原理和NEC协议的规定,实现方案主要包含硬件和软件两部分,在实际的IR模块硬件设计中,一般会实现时序信号编解码流程,提高系统性能和简化软件复杂度。 本文的软件设计将基于简单的GPIO模拟的方式:通过原理实现简单的红外发射,接收流程。总体设计如下:
按照红外协议的编解码规则,整个设计中,需要保证使用38KHz的载波频率进行通信,则GPIO或PWM输出频率为38KHz,同时调整占空比,达到实际的需求。 4、代码实现以下代码主要作为伪代码实现基本的发射和接收逻辑。 #include /*电平定义*/ #define IR_HIGH 1 #define IR_LOW 0 /*状态机定义*/ #define IDLE 0 #define DATA_START 1 #define ADDRESS_CHECK 2 #define COMMAND_START 3 #define COMMAND_CHECK 4 #define REPEAT_CHECK 5 //获取GPIO电平值 unsigned char IR_GetGPIOLevel(void) { // } //输出电平 void IR_SetGPIOLevel(unsigned char level) { } /*延时函数*/ void IR_Delayus(unsigned int us) { // } void IR_Delayms(unsigned int ms) { // } /*同步码*/ void IR_OutputSYNC(void) { IR_SetGPIOLevel(IR_HIGH); IR_Delayms(9); //9ms高电平脉冲 IR_SetGPIOLevel(IR_LOW); IR_Delayus(4500); //4.5ms低电平脉冲 } /*逻辑0输出*/ void IR_Output0(void) { IR_SetGPIOLevel(IR_LOW); IR_Delayus(560); //560us低电平脉冲 IR_SetGPIOLevel(IR_HIGH); IR_Delayus(560); //560us高电平脉冲 } /*逻辑1输出*/ void IR_Output1(void) {u IR_SetGPIOLevel(IR_LOW); IR_Delayus(560); //560us低电平脉冲 IR_SetGPIOLevel(IR_HIGH); IR_Delayus(1690); //1690us高电平脉冲 } /*数据输出*/ void IR_SendData(unsigned char data) { int i; unsigned char bit; //LSB ---> MSB for(i=0; i> i) & 0x1; if(bit) IR_Output1(); else IR_Output0(); } } /*信号编码*/ void IR_Encode(unsigned char addr, unsigned char cmd) { IR_OutputSYNC(); //同步码 IR_SendData(addr); //地址 IR_SendData(~addr); //地址反码 IR_SendData(cmd); //命令 IR_SendData(~cmd); //命令反码 } /*电平检测*/ unsigned int IR_GetHighTime(void) { unsigned int time; //获取高电平时间 //... return time; } unsigned int IR_GetLowTime(void) { unsigned int time; //获取高电平时间 //... return time; } /*信号解码*/ void IR_Decode() { unsigned char data; unsigned char state = IDLE; while(1) { switch(state) { case IDLE: { //判断电平时间,9ms高电平后跟4.5ms低电平 if() { state = DATA_START; //跳到下一个状态 } } break; case DATA_START: { /*开始接收8位地址位。- 对每一位,检测560μs低电平和1690μs高电平(表示1)或560μs低电平和560μs高电平(表示0)。- 每接收一位,将结果累加到地址缓冲区,并进入ADDRESS_CHECK状态*/ state = ADDRESS_CHECK; //跳到下一个状态 } break; case ADDRESS_CHECK: { /*接收并检查8位地址的反码,与之前接收到的地址位进行比较,验证是否一致。 - 如果一致,则进入COMMAND_START状态,否则返回IDLE状态,等待新的同步信号*/ } break; case COMMAND_START: { /*类似于地址接收,开始接收8位命令位,并将结果累加到命令缓冲区*/ } break; case COMMAND_CHECK: { /*接收并检查8位命令的反码,与之前接收到的命令位进行比较,验证是否一致。 - 如果一致,则认为本次接收的红外信号有效,触发相应的命令执行操作。 - 不一致则返回IDLE状态,重新等待同步信号*/ } break; case REPEAT_CHECK: { /*如果在完成命令反码检查后,接收到的是一个单独的560μs低电平和560μs高电平组合(重复码特征),则视为重复命令,执行相应的重复命令处理。 - 如果不是重复码特征,则返回IDLE状态,等待新的命令*/ } break; } } } |
【本文地址】
今日新闻 |
点击排行 |
|
推荐新闻 |
图片新闻 |
|
专题文章 |